초고속 프로세스에서 이미지 기반 제어를 보장하는 최첨단 이미지 처리 구현.
Columbia University, Drexel University, Fermilab, Lehigh University의 연구원은 Euresys 프레임 그래버와 CustomLogic 기능을 통해 카메라 기반 고속 토카막 플라스마 제어 루프에서 신호 수집과 제어 명령 간의 시간을 크게 단축하여 핵융합 에너지를 위한 새로운 기능을 개발할 수 있었습니다.
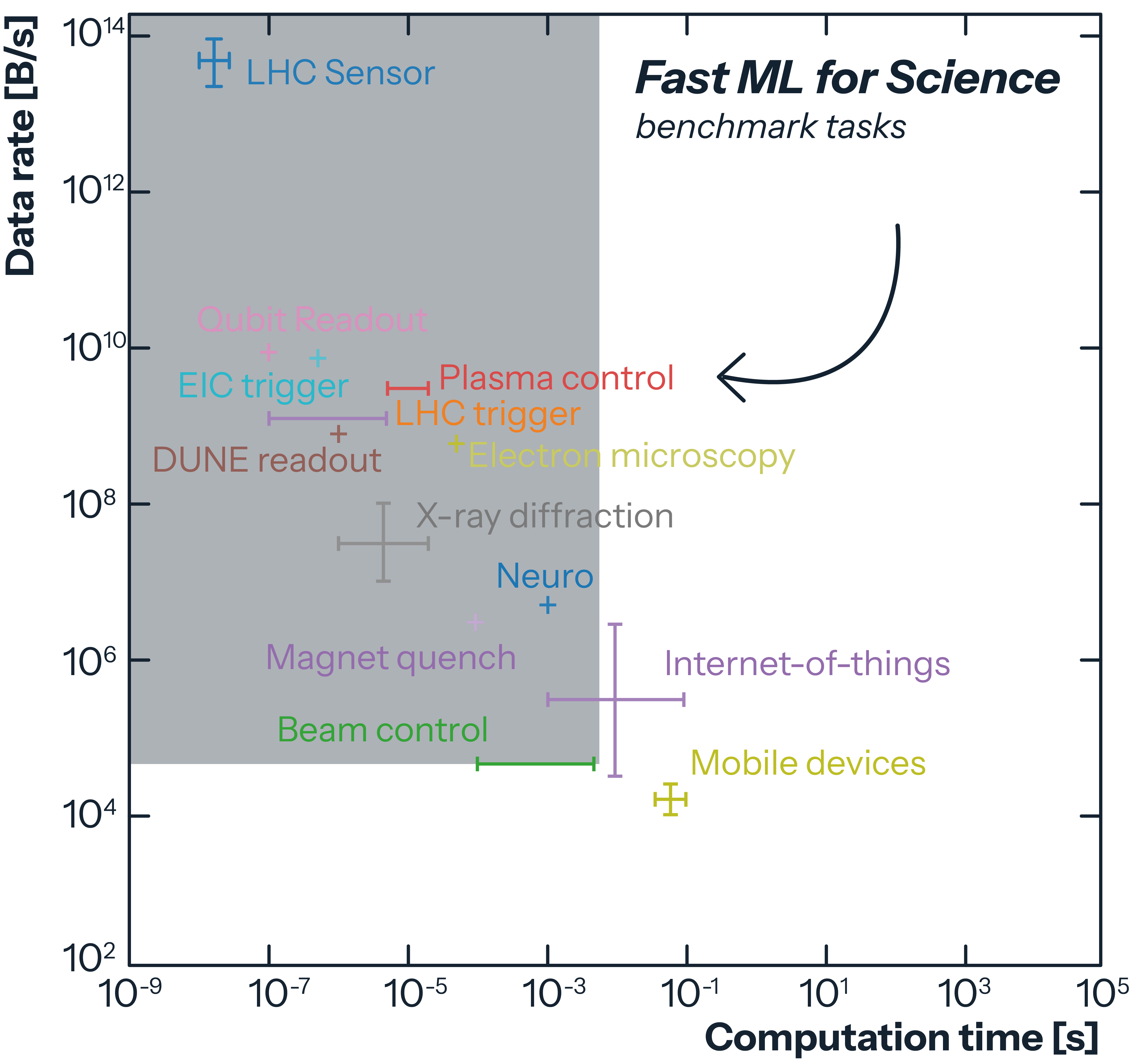
‘Vision-in-the-Loop’의 또 다른 예에서 플라스마 제어 요구사항은 이처럼 복잡한 제어 논리에 대해 전례 없는 속도에 도달합니다.
애플리케이션
토카막은 자기장을 이용하여 고온의 플라스마를 과학자들이 원환이라고 부르는 도넛 모양으로 가두는 기계입니다. 핵융합 에너지 과학자들은 토카막이 현재 미래 핵융합 발전소를 위한 선도적인 플라스마 봉입 개념 중 하나라고 믿고 있습니다.
자기 봉입 핵융합 장치에서 능동 피드백 제어는 플라스마 불안정성을 완화하고 견고한 고성능 작동을 구현하는 데 바람직합니다. 광학 고속 카메라는 강력하고 비침습적 진단 기능을 제공하며 이러한 애플리케이션에 적합할 수 있습니다.
연구팀은 논문에서 Columbia University의 HBT-EP 융합 실험에서 플라스마 제어를 위한 현장 FPGA(Field Programmable Gate Array) 하드웨어에서 100,000fps가 넘는 속도로 빠른 카메라 데이터를 처리한 방법을 설명했습니다. 그 목적은 자기유체역학(MHD) 불안정성 진화를 추적하고 실시간으로 제어 요청을 생성하는 것입니다. 이를 위해 연구팀은 프레임 그래버에 내장된 FPGA에 컨볼루션 신경망(CNN) 모델을 구현하여 17.6µs의 트리거–출력 지연 시간과 최대 120,000fps의 처리량을 달성할 수 있었습니다.